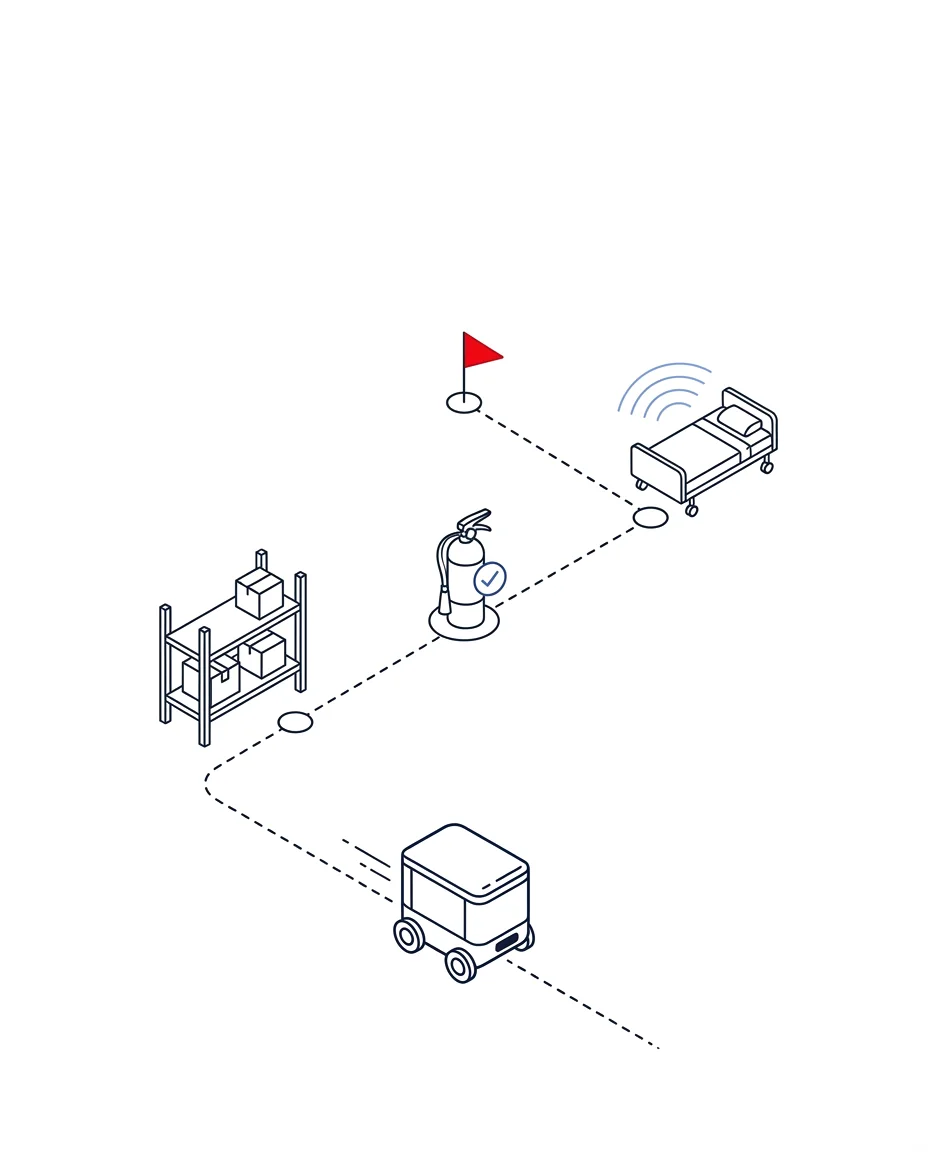
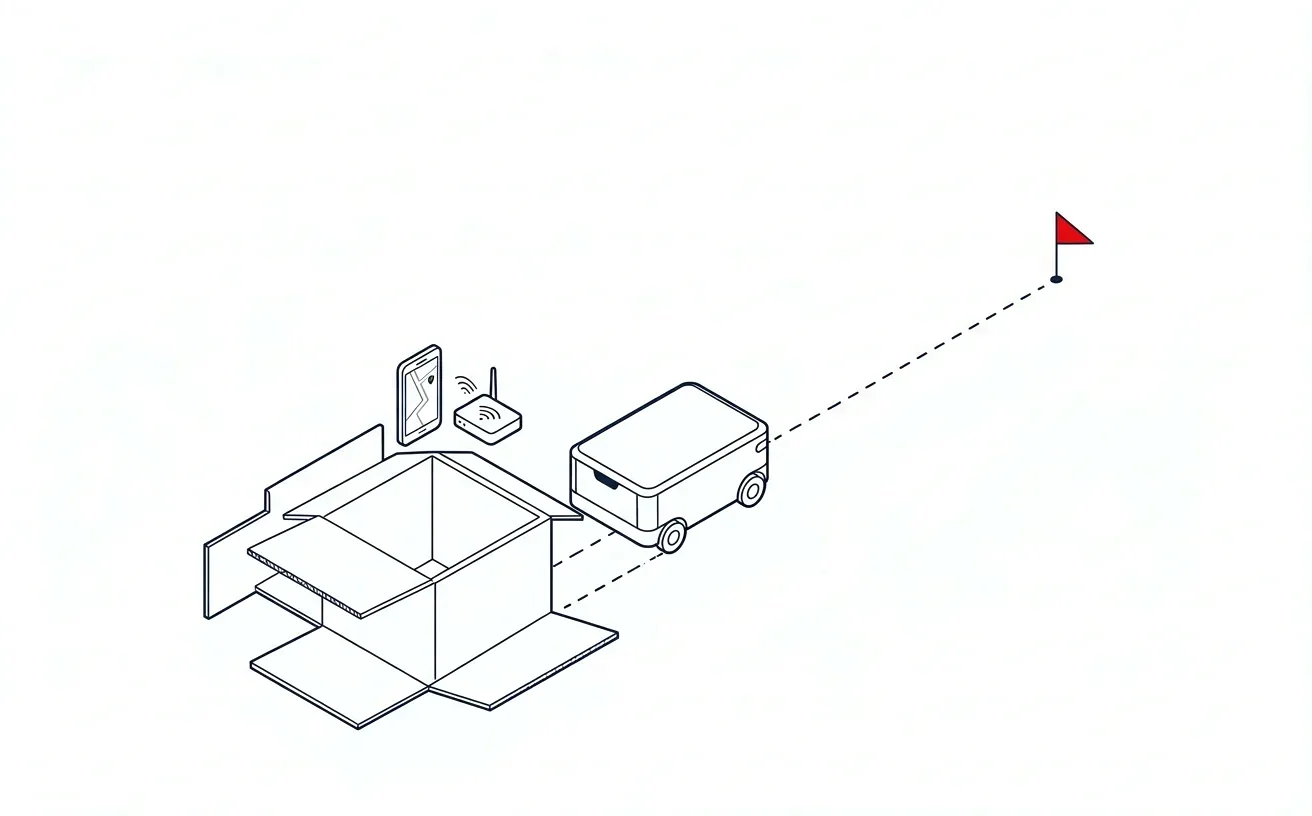
自動化不該是一個要半年才能導入的專案。SLAM = 免鋪磁條、免施工,透過手機就可以完成全部設定——沙崙綠能園區 5 層樓、超過 4,000 m²、100+ 巡檢點,一天佈建完成。
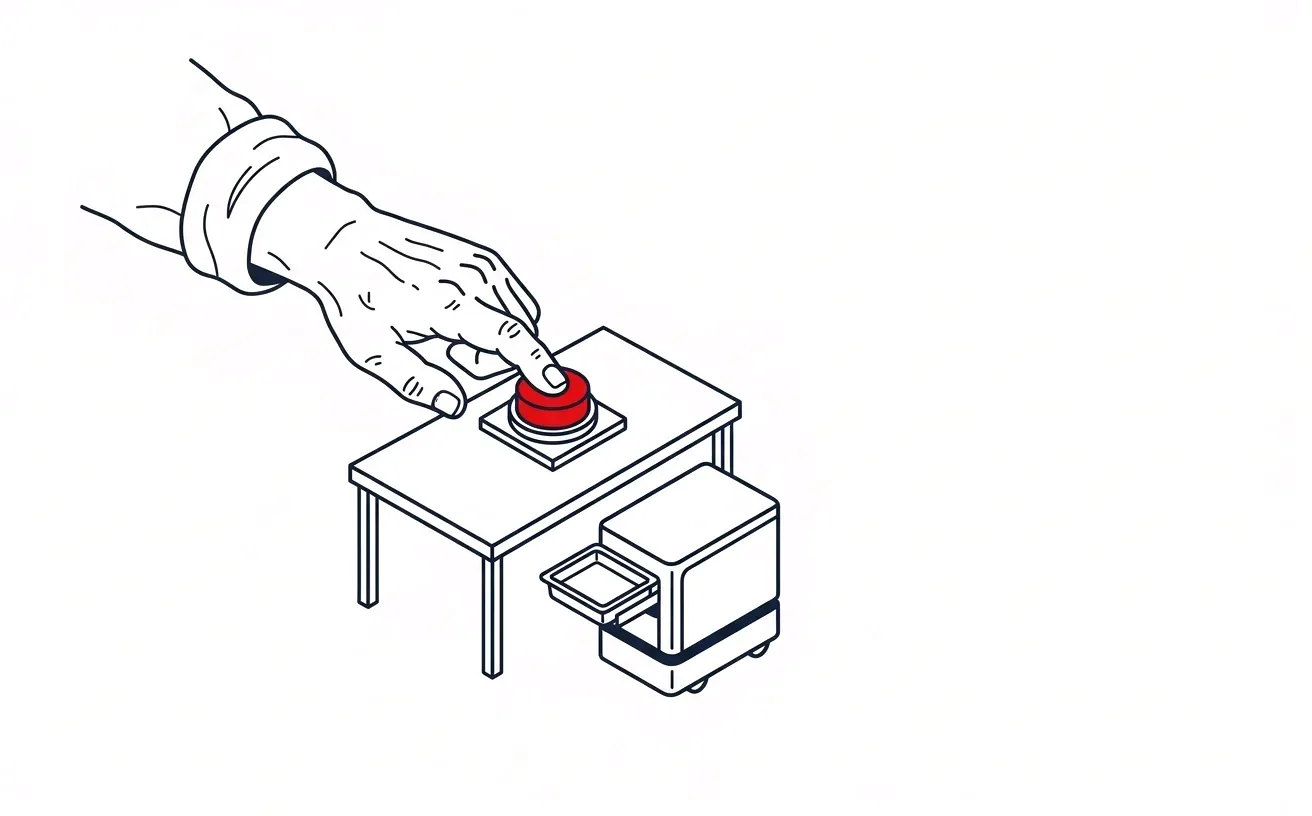
沒有新的軟體介面要學習。打字決定巡檢規則、勾選決定巡房床位;實體按鈕叫車、搖一下車身它就前往下一站。
一套 Physical AI,落地三種現場
Sigma(Σ)就是「整合」——我們讓 AI 以機器人為載體,落地在各行各業
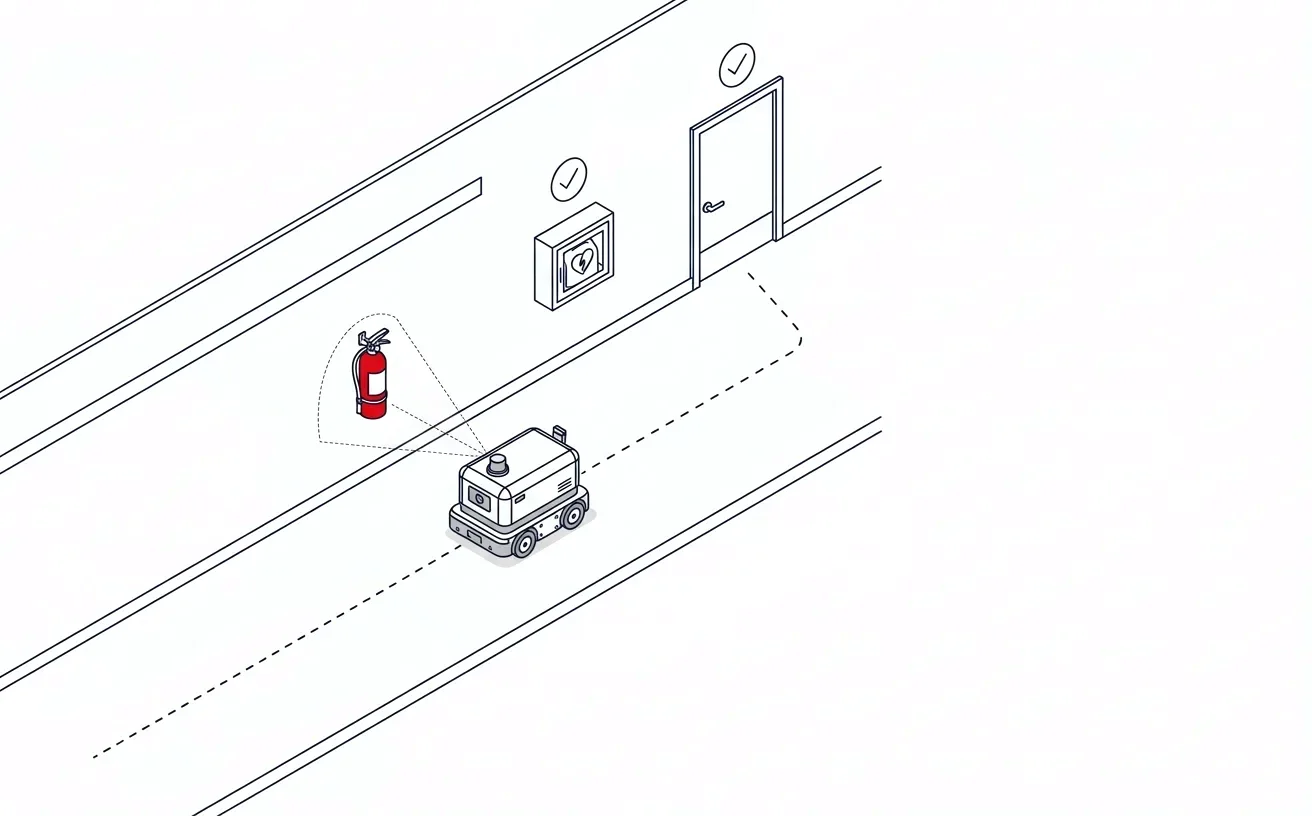
視覺巡檢判讀、自然語言互動、自動產出 PDF 報告、直接控制機器人行動。巡檢、床邊量測、按鈕呼叫、智慧接待,同一個平台的四種能力。
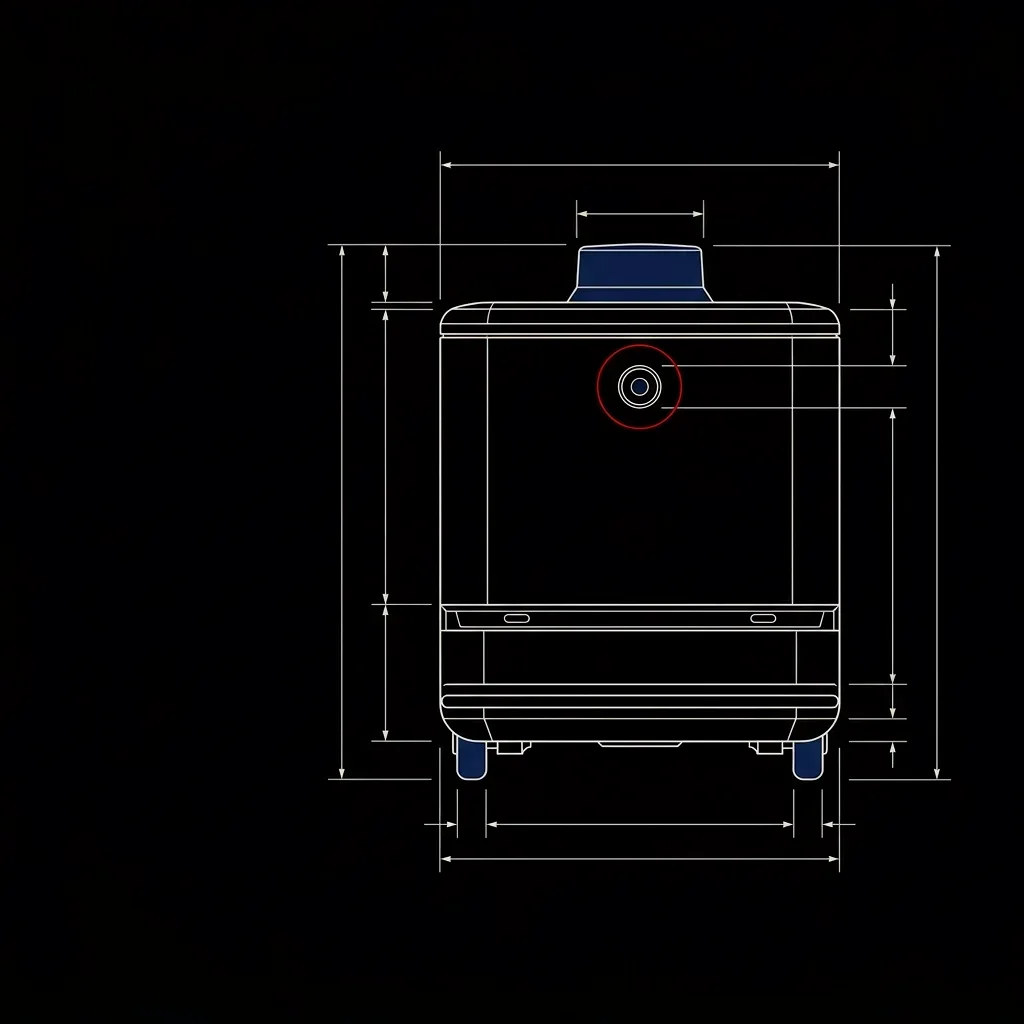
Preferred Networks 系深度學習導航、LiDAR + ToF + 雙 RGB 感測、可分離式貨架對接;商用搬運機器人中最窄的 240mm 機身,日本製、四年全機保固。
Preferred Robotics 公開 Kachaka 外部開發者 API:搬運指令、感測器資料全面開放,以 Apache 2.0 授權上架 GitHub 並支援 ROS 2。本文編譯整理開放範圍與應用方向。
Kachaka 不靠磁條與地標導航,靠的是原廠自研 SLAM。本文編譯 Preferred Robotics 工程師的技術解說:SLAM 原理、建圖的四大難題,以及感測融合、Loop Closing 與資源受限下的工程對策。
AGV 靠磁條、地面導線等「導引」自動行走,AMR 則不需導引、自律判斷路徑。本文編譯原廠文章,解析兩者差異,以及生活與服務場景為何需要免施工的 AMR。