Delivery, inspection, bedside vitals — serious Physical AI at a price that ships today.
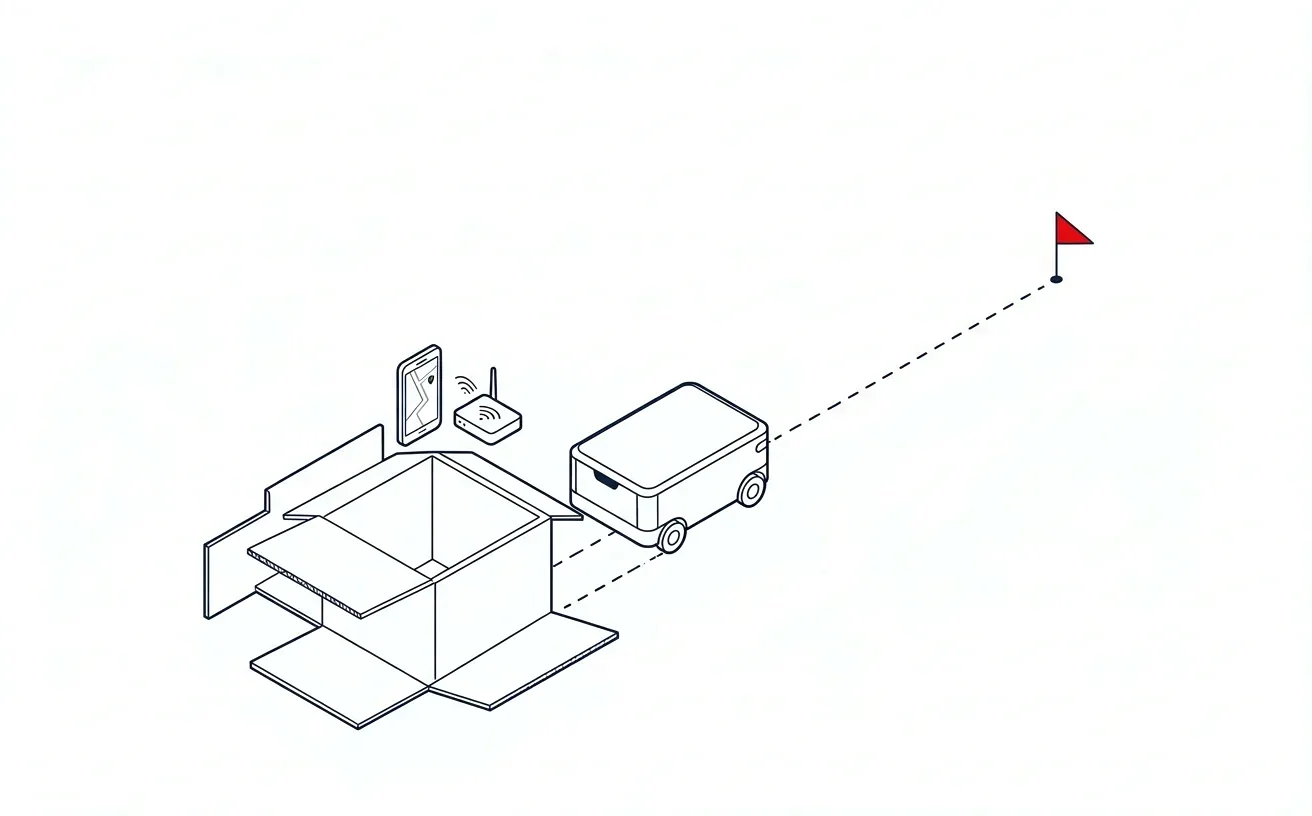
No magnetic tape, no construction. A phone and WiFi are all it takes to start. At 沙崙綠能園區: five floors, over 4,000 m², 100+ inspection points — set up in a single day. Automation is no longer a six-month rollout.
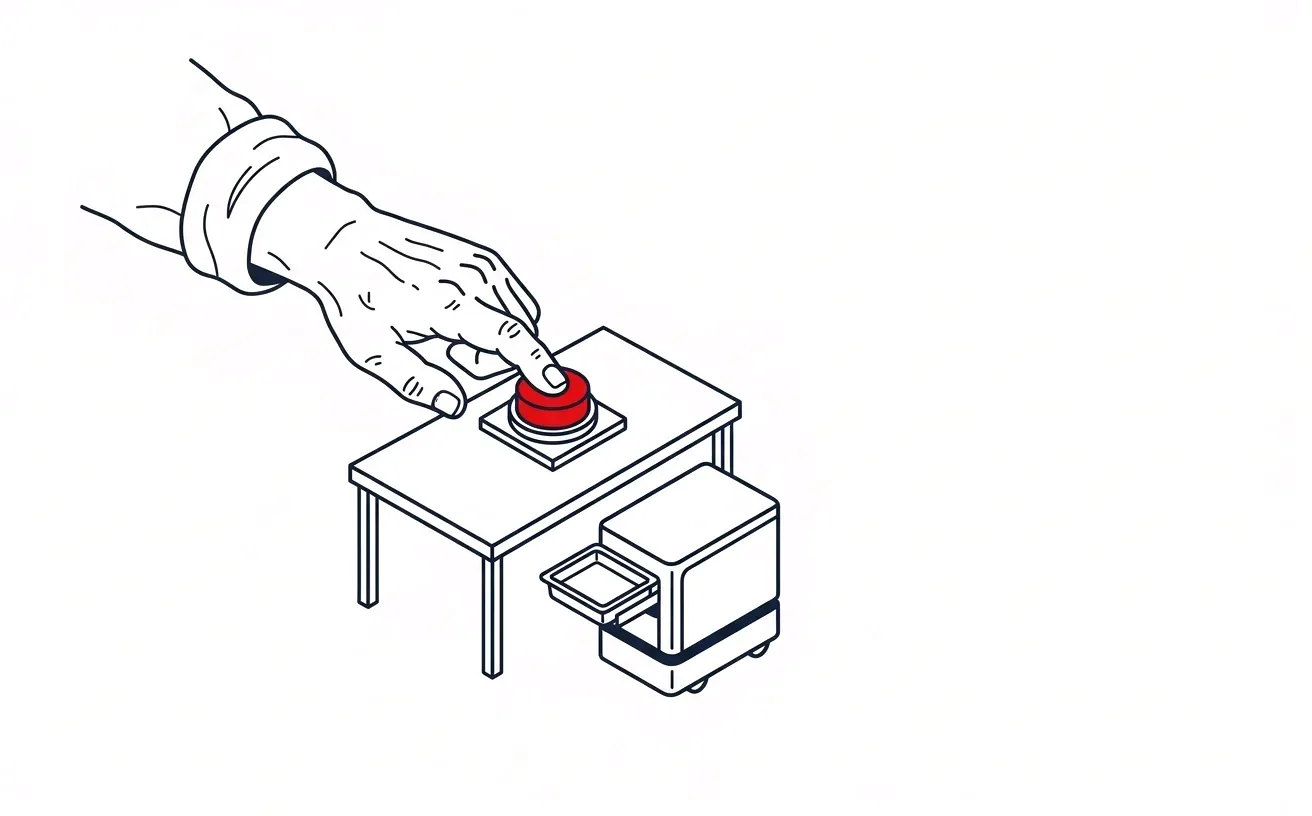
Type a rule to define an inspection. Tick a box to pick the beds to round. Press a real button to call the robot — and give it a shake to send it to the next stop. No new software to learn.
One Physical AI platform, three real-world settings
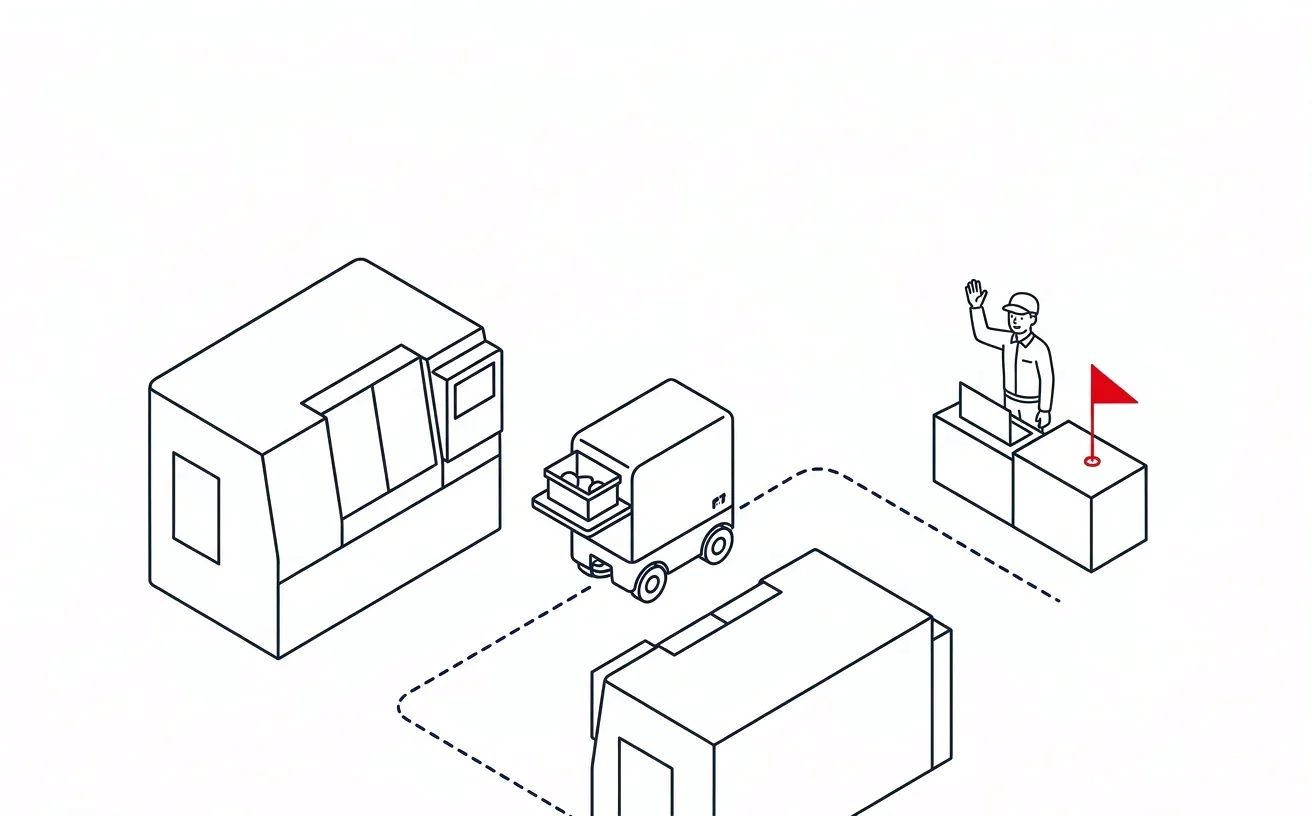
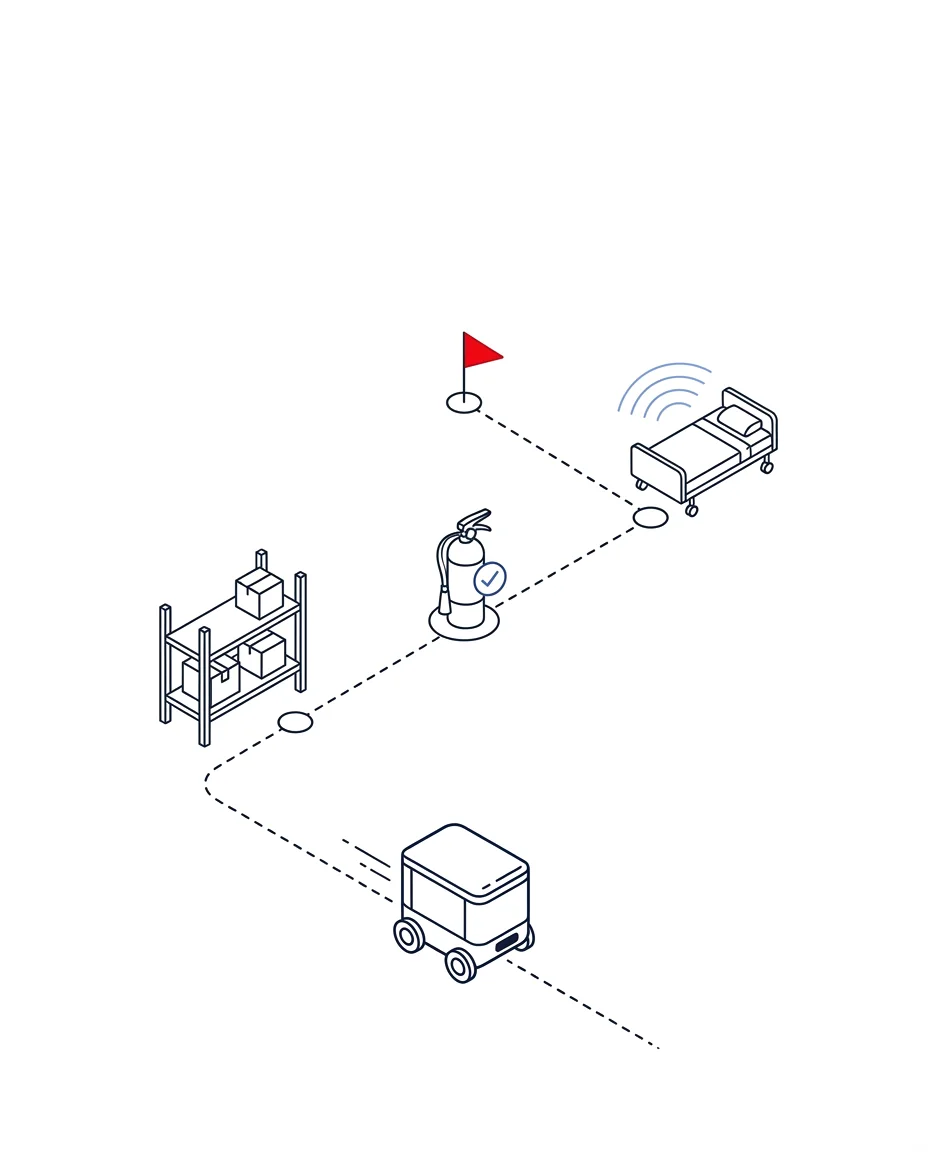
A courier on wheels for any facility — parts, documents, meds, instruments. Called by a real button, and it still arrives through WiFi dead zones. Nothing to learn.
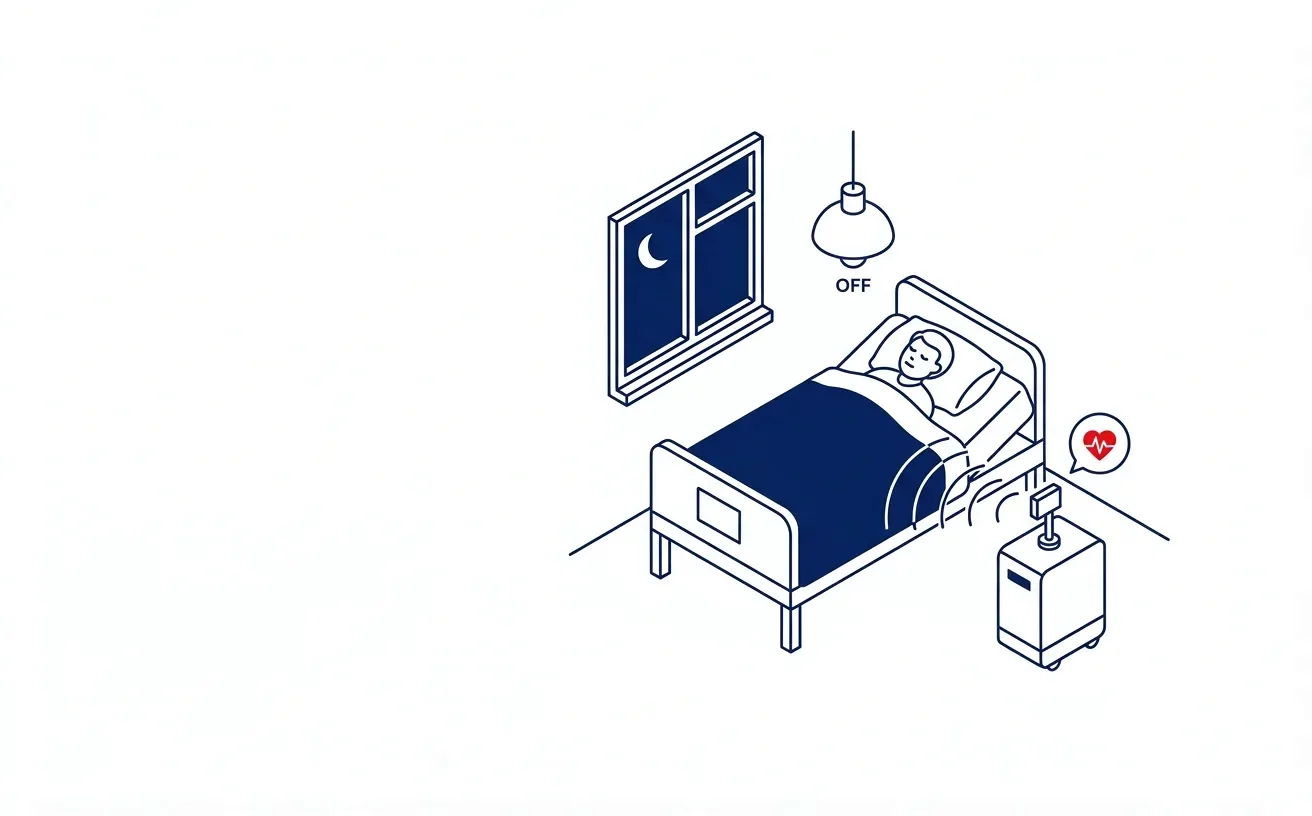
Automated rounds after dark, contactless bedside vitals, an instant alert to the nurses' station the moment something looks wrong. Hand the robot the routine, and give nurses back to their patients.
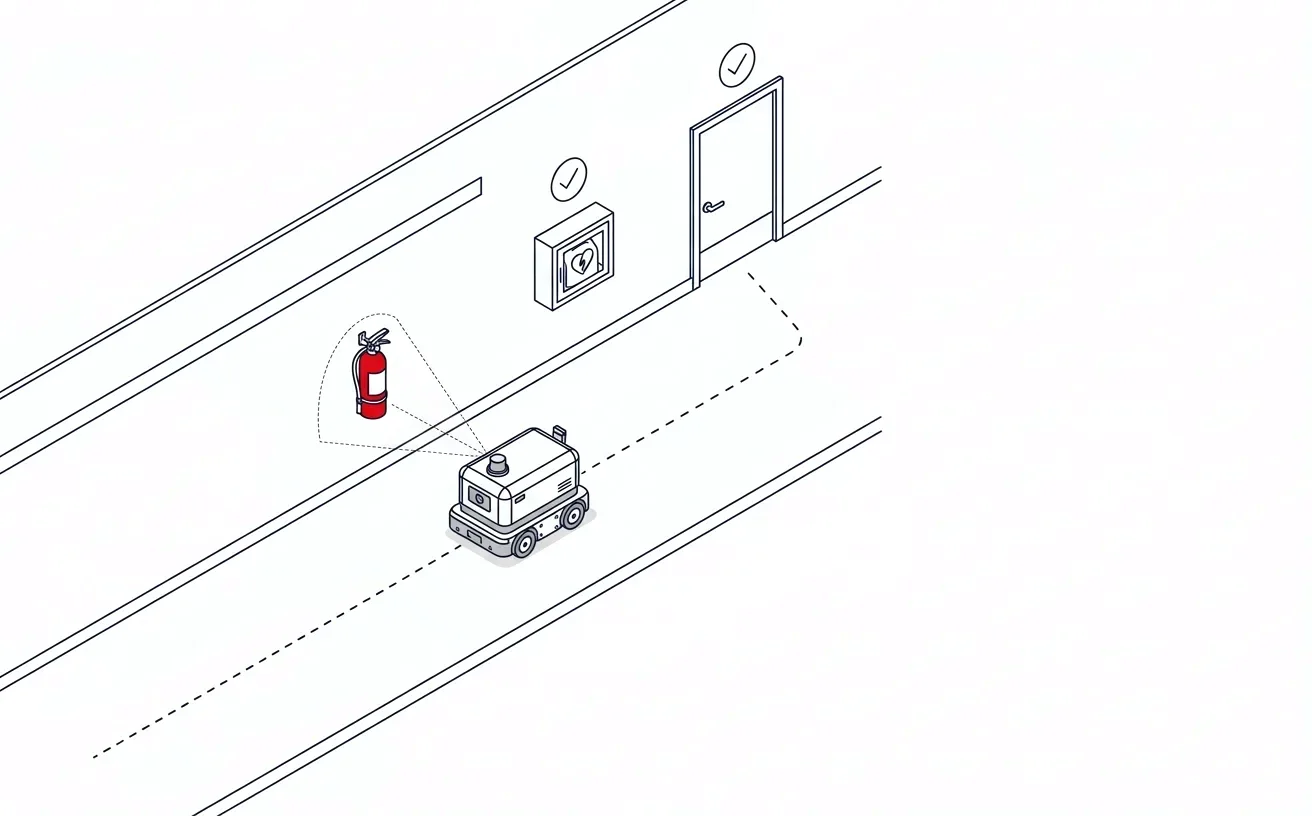
Point-by-point checks on fire extinguishers, AEDs, fire doors, and night lighting. AI flags anything off in real time and writes the report itself. Your answer to the night-shift gap.
Sigma (Σ) stands for integration — AI on a robot body, ready for any industry
It reads what the camera sees, talks in plain language, writes the PDF report on its own, and drives the robot where it needs to go. Inspection, bedside vitals, button-call delivery, smart reception — four jobs, one platform.
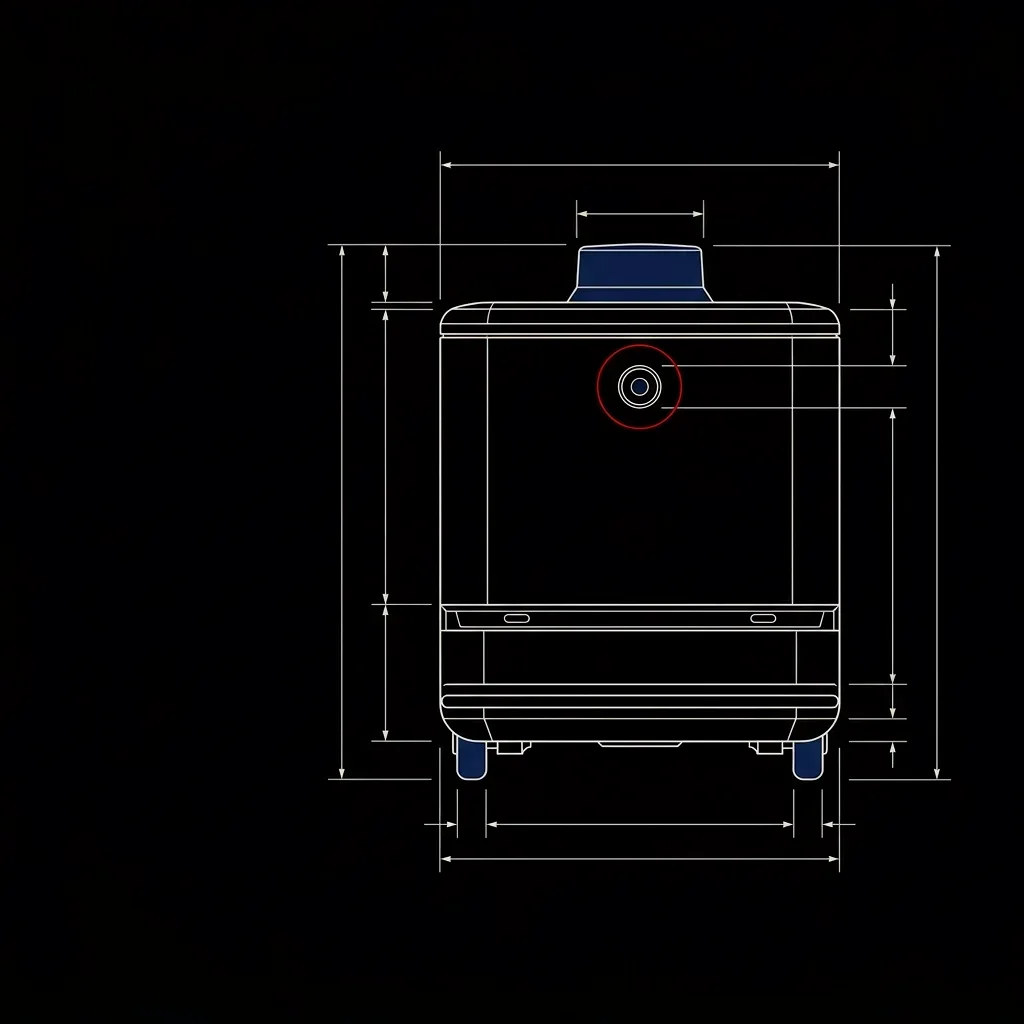
See the AI solution →Deep-learning navigation with Preferred Networks roots. LiDAR, ToF, and dual RGB sensing. Detachable shelf docking. At 240mm, the narrowest body of any commercial transport robot — made in Japan, backed by a four-year whole-unit warranty.
See the robot →
WiFi dead zones strand most AMRs mid-aisle. We generate the route at dispatch and run it on the robot itself — multi-stop, offline, confirmed by an IMU shake.
AGVs follow fixed guidance; AMRs navigate autonomously. Adapted from the manufacturer's original post on the difference between the two and when each applies.
Preferred Robotics opens the Kachaka external developer API on GitHub under Apache 2.0, exposing transport commands and sensor data with ROS 2 support.
We walk your site and hand you a feasibility-and-limitations report. Where it can run and how, where it can't and why — spelled out in black and white up front. Try it first; if it doesn't work out, you pay nothing.