JAPAN CASE — 製造・工廠
林內(Rinnai)大口工廠導入事例|以小型 AMR「Kachaka Pro」實現製程間搬運自動化
リンナイ株式会社(Rinnai,總部:愛知縣名古屋市)
株式会社 Preferred Robotics(總部:東京都千代田區,代表取締役社長:礒部達)在林內株式會社(Rinnai,總部:愛知縣名古屋市)的大口工廠導入了自主搬運機器人「Kachaka Pro」。本文整理該廠導入前面臨的課題與背景,以及目前的實際使用方式。
認識 Kachaka Pro 的契機
大口工廠原本就為了推動工廠自動化而評估 AGV、AMR 的導入,但多數產品價格偏高,導入後難以達到合理的成本效益。後來透過雜誌與網路得知 Kachaka Pro,才開始具體評估導入。
導入搬運機器人的課題與背景
減少搬運作業
「搬運」這項作業本身並不產生附加價值。林內過去已透過輸送帶等自動化設備減少搬運作業、提升生產力,但就產線之間等局部範圍來看,仍時常可見作業者被搬運工作佔去時間的情況。
因應人手不足
製造現場人才難尋,繁忙期人手不足的影響尤其明顯。為因應未來將更趨嚴峻的人力短缺,廠方持續評估搬運機器人。
消除作業屬人化、推動自動化
廠方希望把任何人都能執行的搬運等單純作業積極自動化,減少對特定人員的依賴,讓人力資源集中投入生產力更高的業務。
決定導入 Kachaka Pro 的關鍵
基於上述背景,廠方一直在尋找小型且低成本的搬運機器人。實際洽詢並聽取詳細說明後,特別肯定以下幾點而決定導入:
- SLAM 方式的彈性行走:不需要磁條或 QR code 等導引設施,對產線佈局變更的適應力強,也容易在工廠內與人共存。大口工廠空間有限、必須與人協同作業,這一點格外重要。
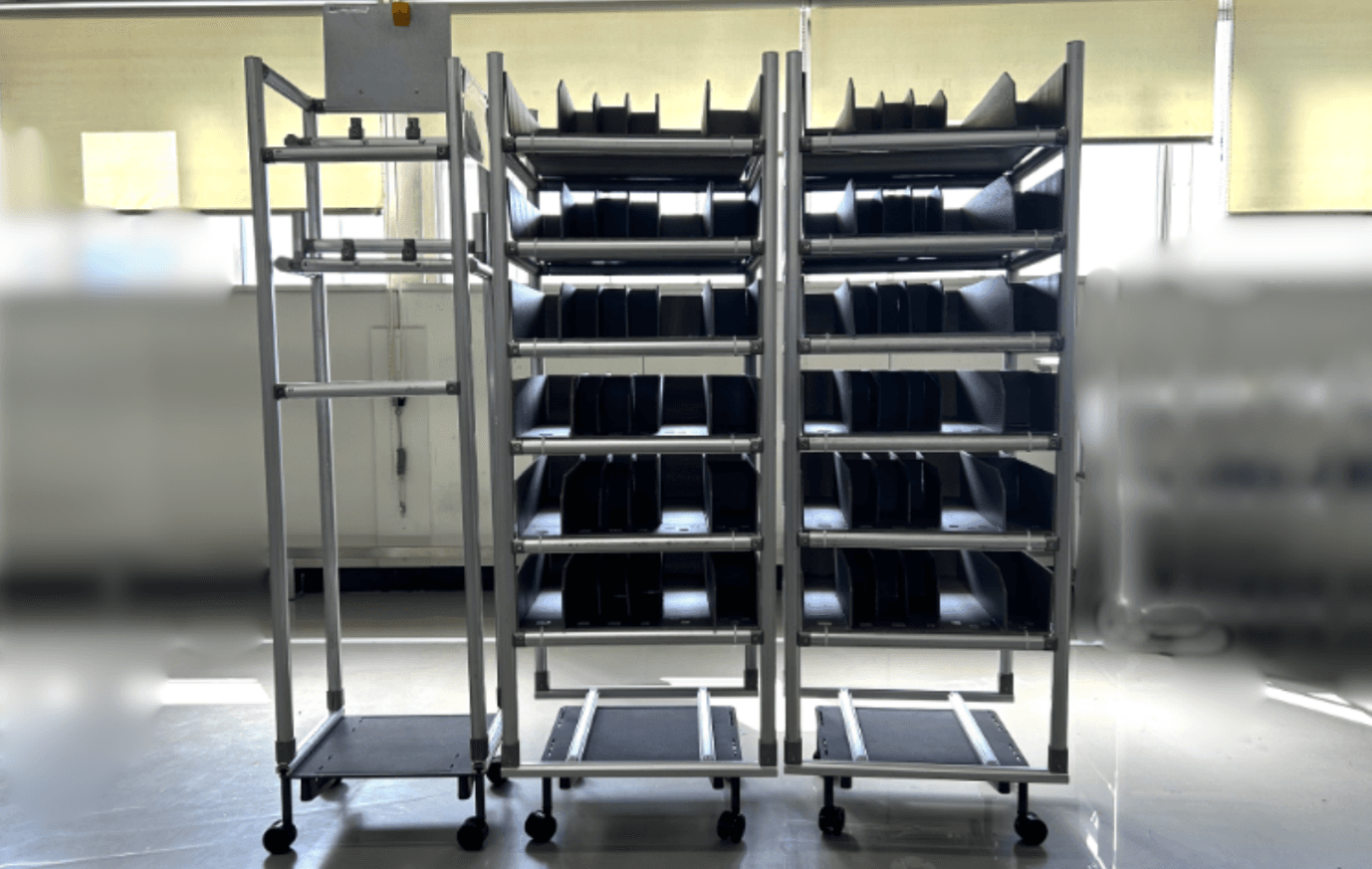
- 小巧的尺寸與擴充性:Kachaka Pro 體積非常小,不易妨礙現場作業者;台車(Kachaka Base)上可依現場需求自由製作好用的層架,擴充性也獲得肯定。
- 相對容易導入的價格帶:在高價 AMR 居多的市場中,Kachaka Pro 在成本面相對容易導入。
Kachaka Pro 在工廠內的使用方式
目前由一台 Kachaka Pro 同時擔任兩種任務:烹調相關家電產品的「中間組裝部材搬運(產線間搬運)」與「空台車回收」。運作流程如下:
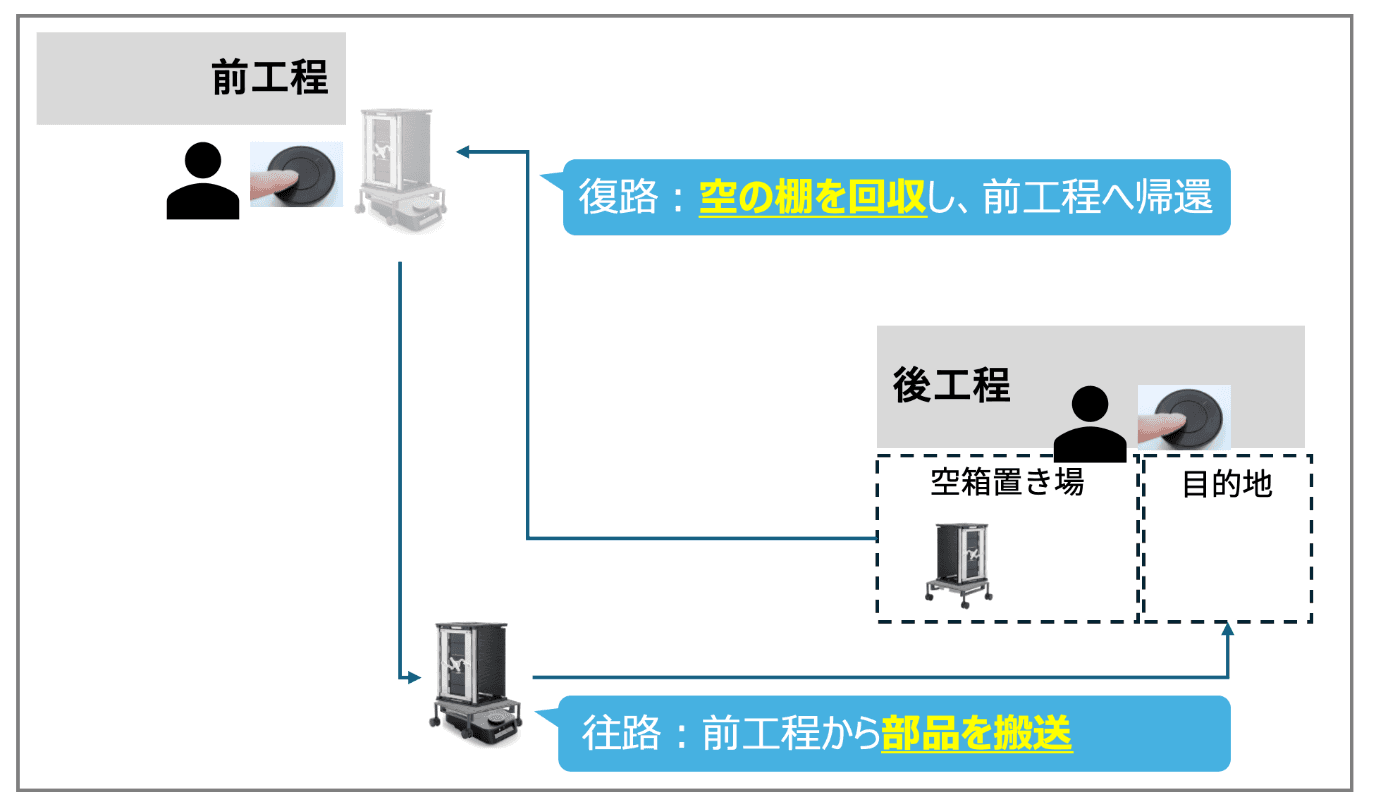
- 作業者在出發產線將中間組裝部材裝載到 Kachaka Base 上
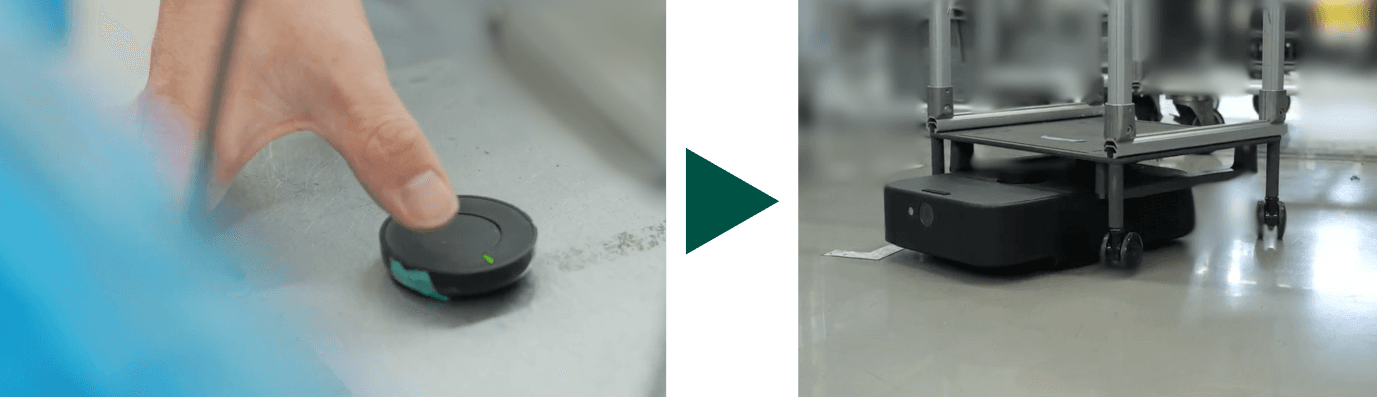
- 作業者按下 Kachaka 按鈕後,機器人自動搬運至下一條產線
- 收貨產線的作業者按下按鈕後,Kachaka Pro 與附近的空層架對接
- 將空層架送回出發地點
現場感受到的導入效益
- 「製程間搬運」與「空台車回收」兩項作業由一台 Kachaka Pro 包辦,成本效益高
- 搬運作業自動化,減輕作業者負擔
- 一鍵操作即可啟動,現場使用壓力小
- 結合自製台車,得以建立最貼合現場的運用方式
對支援體制的評價
現場表示:「從評估導入到正式上線約兩年期間,包含我們任性的要求在內,都獲得了彈性的支援。導入前雖有不安,但能放心信賴並隨時諮詢,帶來很大的安心感。」
未來展望
未來計畫進一步增加台數,在更多製程中運用於中間組裝部材搬運與空台車回收。以人與機器人協作的工廠為目標,持續推進自動化與生產力提升。