Cutting ~1,000 Transport Trips per Month | How Knife Maker Tojiro Deployed the Kachaka Pro AMR
Tojiro (藤次郎株式會社)

This article is a Traditional Chinese summary, here rendered in English, of an official Preferred Robotics deployment case study. The original (in Japanese) is published on kachaka.life. For the full text and images, please refer to the original.
The Company
Tojiro (藤次郎株式會社, headquartered in Tsubame, Niigata) was founded in 1953 and makes knives using a stainless-steel “blade-drawing” forging method. Its products are prized by professionals overseas, with daily output of around 3,000 knives. To sustain that capacity, the company invests aggressively in automating any process that can be automated, and currently runs two Kachaka Pro units to handle inter-process transport.

Background: Longer Transport Distances and Heavier Loads After the New Plant Opened
Tojiro has long worked to eliminate waste on the shop floor, and it views “waste from movement” as the area with the fastest, highest payoff. To keep pace with growing demand at home and abroad, the company opened a new manufacturing plant in July 2025. Capacity rose, but the larger footprint stretched the distances between processes, increasing the load on craftspeople. A box packed with kitchen knives weighs about 20kg and was carried by male and female workers together, raising concerns about excessive physical strain and falling productivity. That prompted the company to evaluate transport robots.
Three Reasons Tojiro Chose Kachaka Pro
According to 若林, Senior Managing Director and head of plant operations, there were three main reasons for choosing Kachaka Pro:
- AMR flexibility: Unlike magnetic-tape-guided AGVs locked to fixed routes, an AMR adapts easily when the factory layout changes.
- Runs through narrow aisles: The team initially worried whether such a compact chassis could handle heavy loads, but a trial run showed it carrying a 20kg knife box smoothly through tight aisles, putting those doubts to rest.
- No reliance on subsidies to deploy: Where competing products often require subsidy applications that drag out the rollout, Kachaka Pro can be put to work immediately, even with two units, and delivers a strong return on investment (ROI).

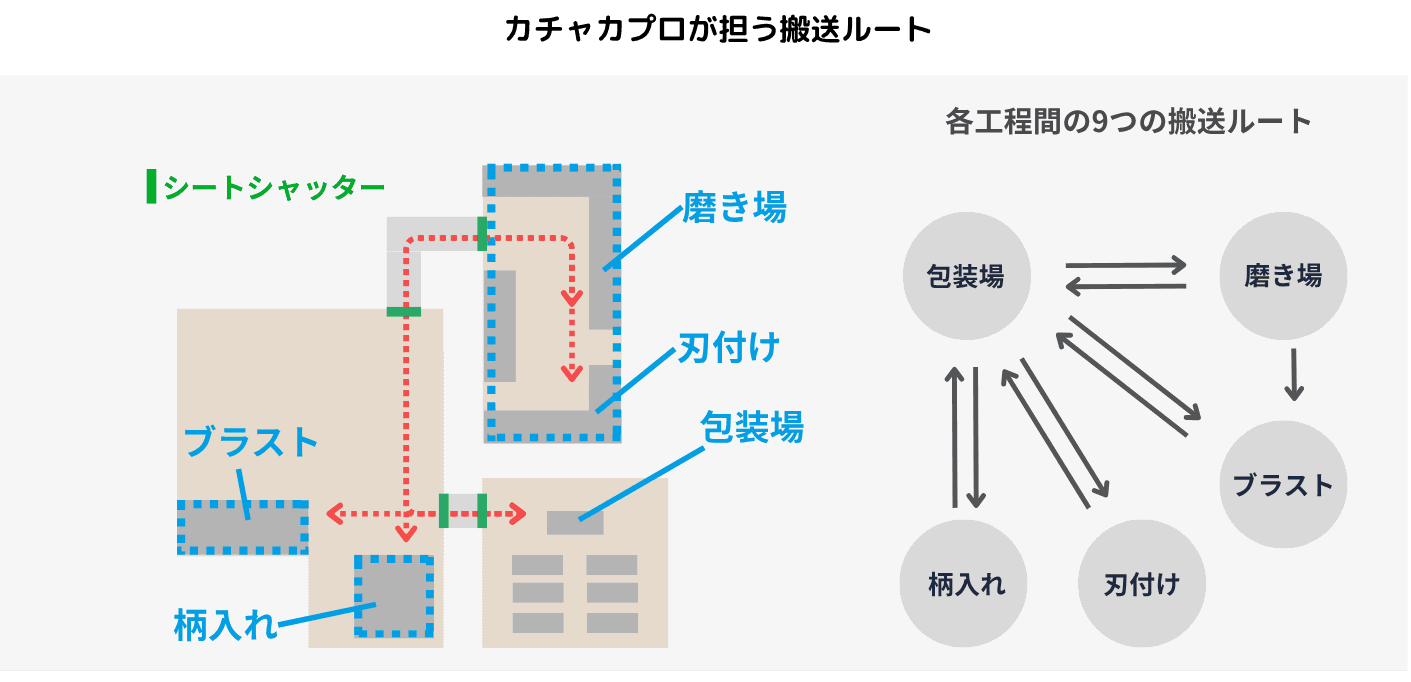
How It’s Used: Passing Through Sheet Shutters, Linking Five Processes
The two Kachaka Pro units mainly handle “returning to the grinding and repair process” those products found to have fine flaws during inspection. Nine transport routes are configured across five processes — packaging (inspection), grinding, edge-setting, sandblasting, and handle-fitting — and the route passes through four sheet shutters along the way, with the robot able to travel through them all the way to each destination.
Because settings can be configured intuitively on a tablet, a young operator on the floor learned the system in just one day. When the layout changes, workers can reconfigure the travel routes themselves, keeping operations flexible.
Results: Roughly 1,000 Transport Trips Automated Each Month
- After deployment, each Kachaka Pro automates an average of 54 trips per day, which across a month of working days eliminates more than 1,000 trips of “interrupting work to carry loads by hand.”
- The physical burden on craftspeople has eased noticeably, freeing up nearly 1 hour per day for higher-value work such as production and quality inspection.
- Awareness on the floor is shifting too: once seeing robots move loads automatically became routine, employees grew more conscious of “the waste of people hauling goods,” and momentum for automation has grown accordingly.

Looking Ahead
Tojiro plans to keep improving the environment — for example, converting sliding doors and standard doors to sheet shutters — to expand Kachaka Pro’s working range. The company has also expressed interest in “Kachaka Fleet Manager” for coordinating multiple units and in “Kachaka Evo,” which can carry up to 100kg.
Summary
For manufacturing sites wary of large capital outlays and high upfront costs, Kachaka Pro offers a low barrier to entry and is easy for the floor to lead and operate. It is well suited to a “start small” approach to transport automation, and it performs even in environments with narrow aisles and frequently changing layouts.